

군사고문관의 심층분석 리포트
Lüneburg Lens(Luneburg 루네베르그 렌즈)는 독일어로서 구면 대칭 구배 인덱스 렌즈라고 합니다.
전형적인 루네베르그 렌즈의 굴절률 n은 중심에서 바깥쪽 표면으로 방사상으로 감소합니다.
루네베르그 렌즈는 가시 광선에서 전파에 이르는 전자기 복사와 함께 사용할 수 있습니다.
루네베르그 렌즈의 기본적인 아이디어를 구상, 제안하였던 인물은 Rudolf Karl Lüneburg(루돌프 칼 루네베르그)였습니다.
Lüneburg는 University of Göttingen(괴팅겐 대학) 에서 공부했으며 , 1930년에 그곳에서 박사 학위를 받았습니다. Nazi를 피해 1934년부터 1935년까지 네덜란드 Leiden University(라이덴 대학교)에서 물리학자로 일했고 , 1935년 미국으로 이주하였습니다.
그곳에서 그는 처음에는 New York University(뉴욕대학교) 수학과에서 근무했습니다 . 1938년부터 1945년까지 그는 State of New York Rochester(뉴욕주 로체스터) 에 있는 American Optical Company 의 일부인 Spencer Lens Company의 연구 부서에서 근무했습니다.
1944년 여름 Brown University(브라운 대학교)에서 교수직을 맡은 후 , 1946년 브라운 대학교의 Dartmouth Eye Institute(다트머스 안과 연구소) 종신직으로 옮겨 광학의 전자기 이론을 연구하고 여러 논문과 관련 서적을 출판했습니다.
이때 저술한 대표작이 『Mathematical Theory of Optics, 광학의 수학적 이론』Brown University Press(브라운 대학교 출판사) 이라는 저서였습니다.
↓ Mathematical Theory of Optics, written by Rudolf Karl Lüneburg
여기에서 루네베르그는 1850년대 James Clerk Maxwell의 Maxwell의 방정식이 제기하고 많은 경우 해결한 수학적 "퍼즐"과 과제, 그리고 그 해결책의 원리를 확장했습니다.
1946년부터 1948년까지 루네베르그는 뉴욕 대학교의 수학 및 기계 연구소에서 수학자로 근무하였으며 Universität Marburg(마르부르크 대학) 과 Technischen Hochschule Darmstadt(다름슈타트 기술 대학) 에서 교수직을 맡았습니다 .
루네베르그의 마지막 직업은 1949년 University of Southern California(서던 캘리포니아 대학교) 의 수학 교수였습니다. 1949년 루네베르그는 교통사고로 사망했습니다.
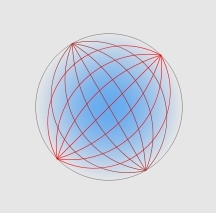
특정 인덱스 프로필의 경우 렌즈는 주어진 두 동심 구의 완벽한 기하학적 이미지를 서로 형성하는데
이 효과를 생성할 수 있는 굴절률 프로파일은 무한히 많습니다.
1944년 Rudolf Karl Lüneburg 교수는 가장 간단한 해결책을 제안하였습니다.
굴절률에 대한 Luneburg의 해결책은 렌즈 외부에 두 개의 공액 초점을 생성하는 것이었습니다.
한 초점이 무한대에 있고 다른 초점이 렌즈의 반대 표면에 있는 경우 해결법은 간단하고 명시적인 형태를 취합니다.
J. Brown과 A. S. Gutman은 이후 하나의 내부 초점과 하나의 외부 초점을 생성하는 방안을 제안했습니다. 물론 이러한 방안은 독자적이지는 않았습니다.
해집합은 수치적으로 평가되어야 하는 정적분 집합으로 정의됩니다.
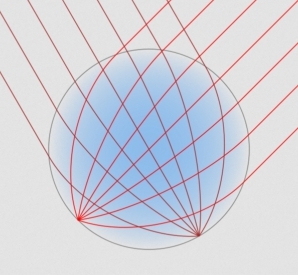
Luneburg 렌즈는 광원이 가장자리에 배치되면 점 광원을 시준된 빔으로 변환하는 제시된 방안으로 만들어진 것입니다.
시준 렌즈는 설정된 spectrometer(스펙트로미터, 분광계)에 들어오는 광선을 평행하게 만드는 곡선형 광학 렌즈를 의미합니다.
Luneburg 렌즈는 추가 에너지를 사용하지 않고 표적의 레이더 반사율을 높이는 데 사용되는 수동 레이더 증강 장치입니다.
렌즈 반사경은 구형 모양이며 완전한 구 또는 반구로 제작될 수 있습니다.
이상적인 Luneburg 렌즈는 표면의 n = 1부터 중심의 n = 2까지 변하는 굴절률("n")을 가지며 굴절률이 표면의 굴절률과 동일한 매질에 내장되어 있는 구 형태인 것입니다.
렌즈(예: n=1). 이 이상적인 Luneburg 렌즈에서 굴절률 n은 렌즈 중심(r=0)에서 표면(r=R)까지 완만하게 변합니다(그림 1),
여기서 R은 다음 방정식을 기반으로 하는 렌즈의 반경입니다.
n = [ 2 – (r/R)2]0.5
기존 렌즈와 달리 Luneburg 렌즈의 구형 모양에는 직접적인 중심 축이 없습니다.
이러한 이유로 렌즈에 입사되는 모든 평면파는 동일한 평면파 방향의 유효 광축과 만나게 되는 것입니다.
이로써 입사 방향에 관계없이 평면파에서 유사하게 작동하는 렌즈가 생성되게 할 수 있는 것입니다.
위의 이상적인 굴절률을 사용하면 입사 평면파가 렌즈 반대면의 한 지점에 집중됩니다.

다양한 동심원 껍질을 통과하는 광선은 법선(2차원 평면의 곡선 위의 어떤 점에서 점을 지나는 접선(tangential, tangential line)에 수직인 직선) 방향으로 구부러진 다음 한 점에 초점을 맞춥니다.
렌즈의 초점 중 하나는 구 표면에 있고 다른 초점은 무한대에 있습니다.
금속 반사경이 초점 주위에 배치되면 광선이 반사되어 동일한 경로를 되돌립니다. 이상적인 Luneburg 렌즈 표면의 각 지점은 반대쪽에 입사되는 평행 복사의 초점입니다. 이것이 Luneburg 렌즈의 원리입니다.
Luneburg 렌즈의 RCS는 렌즈의 레이더 단면적 특징을 나타내는 식으로 다음과 같이 표현됩니다.
RCS = 4ϖ3R4/ 4.
파장 람다(λ)의 제곱에 반비례하고 4에 정비례하는데 th 반경의 힘과 Luneburg 렌즈의 레이더 단면적은 같은 크기의 금속 구 단면적의 수백 배인 것입니다.
이러한 공식에 의해 구현된 Luneburg 렌즈들은 Stealth Aircraft 동체에 설치되어 레이더 스크린 상에 보이게 할 수 있는 것입니다.
↓ Figure 1. F-35 동체 상면과 하부면에 설치된 빨간색 원 안의 작은 돌출물이 Luneburg 렌즈

↓ Figure 2. F-35 동체 상면과 하부면에 설치된 빨간색 원 안의 작은 돌출물이 Luneburg 렌즈

↓ Figure 3. F-35 하부면에 설치된 원 안의 작은 돌출물 2개, Luneburg 렌즈

Stealth Aircraft에 장착된 Luneburg 렌즈들은 탈부착이 가능한 레이더 반사경입니다. 이러한 Luneburg 렌즈를 부착하는 이유는
군사적 기밀이 요구되는 훈련이나 실제 작전을 수행할 때 Stealth 기체를 훈련 중 레이더 스크린에 보이게 하거나 레이더 스크린 상에 표시되는 기체의 레이더 반사신호를 숨기기 위해 군용기에 부착되기도 하는데
이러한 Luneburg 렌즈 레이더 반사경은 그 형태와 달리 기체의 운영에 영향을 주지 않습니다.
또한 군사작전으로 전용되는 Stealth 기체들이 비행을 할 때 은밀한 이동을 위해서 민간 항공 교통 관제소의 레이더 스크린 상에 나타나지 않게 하기 위해 Luneburg 렌즈 레이더 반사경을 부착한다고 합니다. Luneburg 렌즈인 Radar Reflectors(레이더 반사경)은 Stealth 기체 운영에 핵심적 역할을 하는 기외부착물인 것입니다.
↓ Figure 4. F-117A 동체 상면 좌우에 설치된 원 안의 작은 돌출물이 Luneburg 렌즈

현재까지 Stealth RCS(레이더 단면적, 레이더 시그니처)의 기준치로 사용되는 F-117A와 F-22 Raptor의 RCS는 숫자는 분류되어 있지만 기준이 되는 가장 좋은 추정치로서 F-117A의 RCS가 0.003미터이며 F-22 Raptor는 0.0001미터라고 합니다.
이를 시각적인 물체로 표현해 보면 작은 금속 볼 베어링의 RCS와 동일합니다.
RCS를 최소화하는 것이 Stealth 기체 운영의 목표이지만 운영상 RCS 면적을 늘려야 할 때도 있습니다.
단 운영 목적상 적절하거나 필요한 경우에 한 해 레이더에 표시되도록 RCS를 늘려야 하는 것입니다.
예를 들어, 테스트의 일부로 스텔스 항공기를 추적하는 경우 항공기 자체를 근본적으로 재구성하지 않고(분명히 비실용적이고 바람직하지 않음) 레이더 스크린 상에서 이를 확인하게 하는 것입니다. 다시 말해서 스위치로 제어되는 "클로킹 모드"가 아닌 항상 "켜져 있는" 스텔스 모드인 것입니다.
또 소형 항공기나 미사일을 훨씬 더 크게 보이게 만들어 적의 추적 레이더에 레이더 요원이 오해를 불러일으킬 수 있게 하여 적의 대응을 혼란스럽게 하고 방어 자원이나 대응을 잘못 운영하게 할 수도 있습니다.
↓ Figure 5. F-22 Raptor 동체 하면에 설치된 원 안의 작은 돌출물이 Luneburg 렌즈

↓ Figure 6. 동체 하면에 설치된 Luneburg 렌즈

Luneburg 렌즈는 고차원 수학공식과 제조 기술을 기반으로 한 매우 효율적인 레이더 에너지 반사 장치인데
이론적 Luneburg 렌즈는 중심에서 외부까지 부드럽고 연속적인 굴절률 구배를 요구합니다.
그러나 이를 실제적으로 제조, 운영하는데에는 일반적으로 실행 가능할 만큼 만들 수 있는 기술이 아닌 것입니다.
↓ Figure 7. Luneburg 렌즈의 표준 모델 (Rozendal Associates, Inc. (Sunnyvale, CA)

루넨베르그 렌즈의 표준 모델에서 몇 개의 동심원 셸 층으로 만들어졌지만, 많은 용도에 적합한 성능을 제공하고 있습니다.
이론적으로 입사광선이 부드럽게 휘어지려면 동심원 껍질이 많이 필요합니다. 실제로 Luneburg 렌즈는 각각 굴절률이 다른 소수의 개별 동심 껍질로 이루어진 층 구조로 구성됩니다.
이러한 껍질은 Luneburg의 이상적인 솔루션과 약간 다른 계단형 굴절률 프로파일을 형성하게 되는 것입니다.
몇 개의 동심 쉘이라도 허용 가능한 성능을 제공할 수 있다고 합니다.
서방에서 Luneburg Lens를 제조, 공급하는 곳은 공식적으로 3곳
Figure 5.에서와 같이 Rozendal Associates, Inc.(California, City of Sunnyvale) 캘리포니아주 서니베일 소재, 는 직경이 2~32 inch인 렌즈를 카탈로그 품목으로 제공하고 직경이 최대 48 inch인 계단형 인덱스 렌즈를 제조하기 위한 제조시설을 보유하고 있습니다
또 다른 공급업체는 Aresia(Villeneuve la Garenne – 프랑스)로, 내부 장착용으로 설계된 모든 크기형태의 Radar Reflectors를 제공합니다
↓ Figure 8. 군사/항공우주 대기업 Aresia의 다양한 내부 마운트 장착용 Luneburg 렌즈 품목들

↓ Figure 9. Luneburg 렌즈 2개를 넣어 설계한 Banshee Whirlwind 비행표적
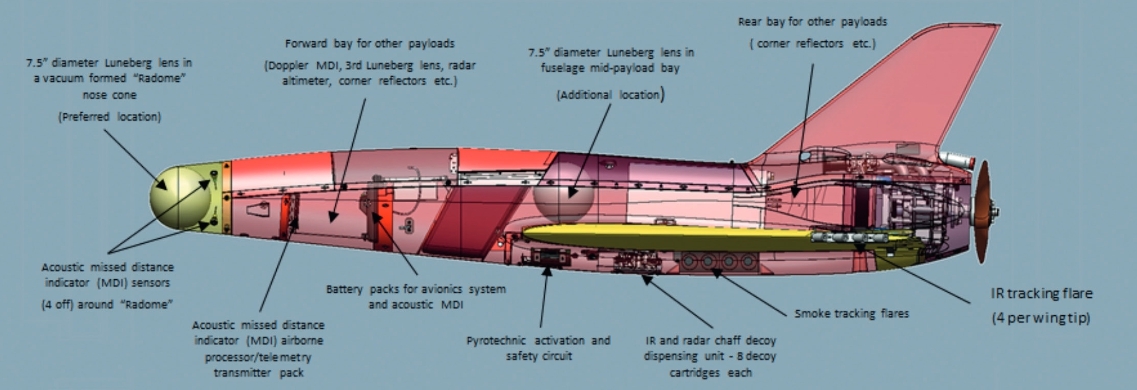
QinetiQ(Ashford, Kent, United Kingdom, 영국 켄트 애쉬포드)社 는 이러한 렌즈를 제조하고 Banshee Whirlwind™ 원격 조종 공중 표적 내부에 자체 7.5인치 장치 2 개를 설치하여 통합하는 설계를 하였습니다. 이로 인해 RCS 및 레이더 추적 기능이 향상을 향상시켰습니다.
따라서 중국이 F-22, F-35를 레이더로 탐지했다고 주장하는 내용과 인도에서 J-20을 탐지했다고 주장하는 유일한 단서는 Radar Reflectors가 장착되어 탐지했을 가능성이 높다는 것입니다.
보통 수동형 레이더 센서로 항공기들을 추적할 수 있는 유일한 방법은 센서를 장착한 항공기가 지그재그로 기동(좌우 90도, 최소 2회 회전)을 수행하여 공중에 방출되는 엔진추력 열에너지와 날개들의 플랩의 움직임 변화를 일으키는 베어링을 통해 운동학적인 범위, 목표 거리를 Kalman filter tracking algorithm을 사용하여 시간에 따라 추정하는 것이라고 합니다.
↓ track other aircraft with passive sensor



'위인.교육.기타 > 군대 . 무기. 분쟁.' 카테고리의 다른 글
| KF-21 기사회생! KF-21 초도양산 예산 2400억 등 59조5800억 규모 내년 국방예산 국회 통과! (0) | 2023.12.22 |
|---|---|
| <윤석준의 차밀> 中 H-20형 폭격기가 美 B-2형의 붕어빵식 모방형임에도 위협으로 간주하는 이유 (0) | 2023.11.18 |
| 고도 100㎞에서 적 미사일 ‘쾅’...우주 전쟁 문 연 ‘이스라엘판 사드’ (1) | 2023.11.12 |
| B-21 Raider 차세대 스텔스 폭격기 첫비행 (0) | 2023.11.12 |
| 최근 폴란드에 수출되고있는 대한민국 KAI의 FA-50GF 동체하부의 가짜 캐노피 도색(False Canopy) (0) | 2023.11.07 |